Dagen D... Jag fick äntligen ändan ur vagnen och kapade bort dom "överflödiga" tänderna på kamaxeldrevet. Sen gjorde jag ett försök, stendöd förutom startmotorn. Jag har kopplat in en elpump i serie med den mekaniska pumpen och med hjälp av den började den tända på en cylinder. Fram med oscilloskopet och konstaterade ganska direkt att även denna kamaxelgivare byter "polaritet" vid ca 150 rpm. Vis av föregående gång så gjorde jag om programmet till att detektera HIGH istället för LOW på kamaxelingången och sen flyttade jag ut givaren från kamaxeltanden en bit och sen startade motorn direkt och går som den skall, nästan. Denna motor är betydligt starkare än den som sitter i traktorn så spridarna ger betydligt mer soppa per vevaxelgrad så nu när man gasar så ryker den hejdlöst tills den kommit upp i börvärdet. Detta är en ganska smal sak att få till, bara lite ändringar i konstanterna på programmet.
Det här med att kamaxelgivaren byter "polaritet" behövs nog en förklaring på?
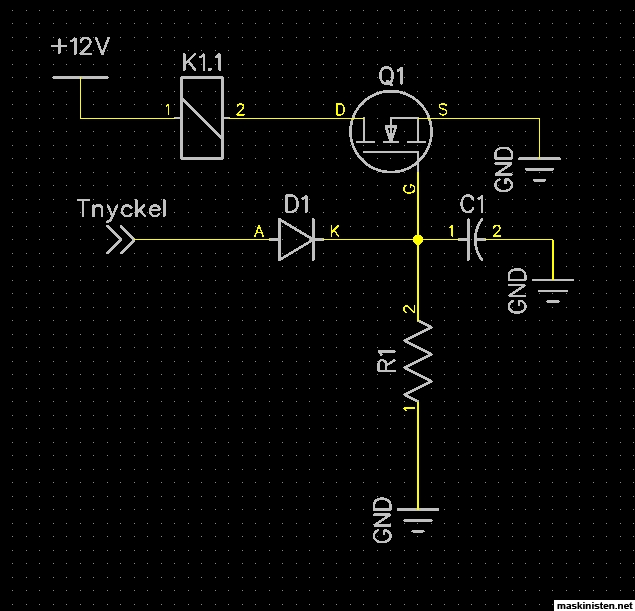
När man kör riktigt sakta så blir kamaxelgivarens
utgång låg vid varje tand och är dessemellan hög. När man kommer upp i startmotorvarv så byter givaren och blir hög vid varje tand och låg dessemellan. Vad jag minns så var det lika dant på traktorn så jag var beredd denna gång... Vafför gör det på detta viset???





























 299 Spetsstjärtad duva
299 Spetsstjärtad duva



")










